����ϼ����ѧ��
����������ѧ��������ϢѧԺ���㶫����510640
1ǰ�Ԫ�
ʱ���ձ�����ڹ�ҵ�����У��˷�ʱ�����������߲�Ʒ����������Ч���кܴ�İ�����ʱ���̵Ŀ��Ʒ����кܶ࣬������SmithԤ�����Ʒ���1�������������е����ܿ��Ʒ���Ҳ���㷺Ӧ�õ�ʱ��ϵͳ�С�������ʱ��ϵͳ�������ԣ�����IJ�ȷ���Ժ��ŵ�����ԣ�ʹ�úܶ���Ʒ�����Ӧ�ü�ֵ����SmithԤ��������Ȼ�ܹ�����ʱ�Ͳ����������ǽ����ھ�ȷ����ѧģ���ϵģ���������������ͷ�ɢ���ҿ������������ģ������Ƽ��������ܺã�³����ǿ�����������ɲ���ţ���Ҳ��Ҫ��ȷ����ѧģ�ͣ����ڲ�ģ��ʧ��ʱ������Ч�������Զ��ɼ������ַ������ǽ����ھ�ȷ����ѧģ�͵Ļ����ϵġ������ڳ���IMC�Ļ����ϣ�����ģ�����ƣ���ģ����������Ϊ��ģ�����������������������ĸĽ��Ǻ����ġ���Ч�ģ�����������̬������������ϵͳ��·�ֲ�����һ�����ֻ��ڣ�����������Ч��������̬����
2ϵͳ�ṹ�������
ʱ��ϵͳ���Ƶ�һ���ؼ����ܷ�ȷ��Ԥ��ϵͳ����ʱ�����������һ������Ч�ķ�����SmithԤ��������ͼ2��1��ʾ��ͨ����ʱ�͵IJ������Ӷ��õ�һ��û��ʱ�͵�ϵͳ��ʹ�ÿ����������ܶࡣ��SmithԤ��������Ҫ�о�ȷ����ѧģ�ͣ�����ϵͳ���ײ�����������ɢ��ͼ2��1��SmithԤ������ϵͳ������ģ����ϵͳ��ʽ�����е����߲��־�����ģ����������
��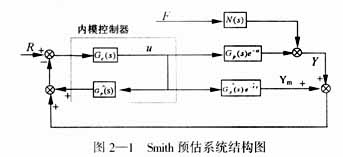
ʵ���ϣ�SmithԤ����������ģ����ϵͳ�е�һ��������ʽ�������ϵͳ�У������߲��ּ���ģ������ΪGm(s)�����ϵͳ�Ĵ��ݺ���Ϊ��
(R��FN(s))��FN(s)����ˣ�ϵͳ��Ϊ����ϵͳ�����ԣ������������£�ֻҪ����Ϳ������ȶ���ϵͳ���ȶ���

��FN(s))����ˣ����Ȳ����ǿ������Ƿ��ʵ�֣������Ϊ ��ϵͳ���ڸ���R�����F���������0�����ԣ���ģ�����봫ͳ�ķ������ƱȽϣ�����Ҫ���ŵ�����ܹ��ڻ�����ö�̬��Ӧ��ͬʱ�����Ա�֤ϵͳ���ȶ��Ժ�³���ԡ�����������������������ǰ���� ��ϵͳ���ڸ���R�����F���������0�����ԣ���ģ�����봫ͳ�ķ������ƱȽϣ�����Ҫ���ŵ�����ܹ��ڻ�����ö�̬��Ӧ��ͬʱ�����Ա�֤ϵͳ���ȶ��Ժ�³���ԡ�����������������������ǰ���� ��ѡ�������Gm(s)��ǰ����뱣֤���ǿ���ʵ�ֵģ����һ ��ѡ�������Gm(s)��ǰ����뱣֤���ǿ���ʵ�ֵģ����һ
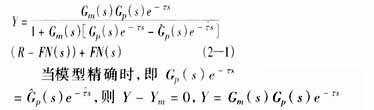
�±�֤ϵͳ��³���ԣ�ͬʱҲ������Ч�����ⲿ������������ģ���ƵĻ����ϣ�������ģ�����ơ�������Ϊģ�����������õ�³���ԣ���������Ϊ����ı仯��ʧȥ�ȶ��ԣ�����һ���ģ������ʵ���Ͼ���PD���ƣ���һ���һ����ʱ��ϵͳ��������IMC�������˲�������һ���֣���˰�����Ϊ���������ǿ��еġ�����Ļ��ֻ�����Ϊ�������ƣ�ֱ�Ӷ�ϵͳƫ��������á��������ò�����������ϵͳ����̬�����Һ�ģ��������һ����Ϊһ��IMC��ʹ����ϵͳ�����Ƶ�³���ԡ�����ṹ��ͼ2��2��ʾ����
3ϵͳ�ṹ������
ͼ2��2������ϵͳ�ṹ�У�ʹ��ģ����������Ϊ��������������������·����һ�����ֻ��ڣ�����֤���ýṹʵ���Ͼ�����ģ���ƽṹ����
���ھ��з���������ģ�����������ô��ݺ�����ʾ��Ϊ�˼������������Ƴ�PD���������ּ��贫�ݺ���ΪGpd(s)�����ֻ���ΪGi(s)������Եõ�ͼ2��2��ϵͳ�Ĵ��ݺ���Ϊ����
(2��1)ʽһ�������ϵͳʵ���Ͼ�����ģ���ƽṹ��ֻ�Ƕ���ģ�ͺ���ģ�Ͷ��Ѿ������˱仯������Ϳ���֤������ͼ2��2�ĽṹҲ���ź�һ����ģ����ϵͳһ�����ȶ��Ժ�³���ԡ�һ����ģ���������Ա�ʾ�� �Ѿ��и���������2��3��֤����L(s)�е��˲��������Ǻܹؼ��ģ�ֻҪ����ѡ��žͿ���ʹϵͳ�ȶ�����Խ��������Խ���ģ��ʧ�䣬ϵͳ�������Խƽ�����෴�����ģ��ʧ��ԽС������Ҫ�Ħ�ԽС��������Ӧ̫�����ܶ�����Ҳ����������ģ��ʧ����߲��ɲ��Ŷ�����ģ����Ҳ���Ա�֤ϵͳ���ȶ��ԡ��� �Ѿ��и���������2��3��֤����L(s)�е��˲��������Ǻܹؼ��ģ�ֻҪ����ѡ��žͿ���ʹϵͳ�ȶ�����Խ��������Խ���ģ��ʧ�䣬ϵͳ�������Խƽ�����෴�����ģ��ʧ��ԽС������Ҫ�Ħ�ԽС��������Ӧ̫�����ܶ�����Ҳ����������ģ��ʧ����߲��ɲ��Ŷ�����ģ����Ҳ���Ա�֤ϵͳ���ȶ��ԡ���
��Ӧ�أ���ͼ2��2�о��ǵ���ģ���������ͻ������ã�����൱�ڵ���IMC����ˣ�ģ���������еIJ����ͻ��ֻ��ڵĻ��������Ǻ���Ҫ�ģ�ֻҪ�����������ǾͿ��Դﵽ���õĿ��ơ���
4ģ������������ƪ�
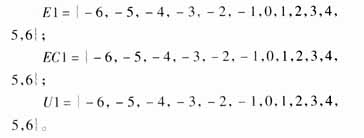
ģ����������Ȼ��һ���ϵͳ���Ѿ����˹㷺��Ӧ�ã����Ƕ��ڲ�ͬ�ı��ض���������Ŀ��ƹ�������ͬ�����ĵ�ģ����������Ե���ʱ�Ͷ���Ϊ���ܹ��õ��ϺõĶ�̬���̣�Ӧʹ����ģ������������ͨ��ģ���������и��õ�Ԥ�����ܡ��������ף�4���������ר�����ʱ��ϵͳ�о��õ���ģ�����ƹ������ģ��������������¡�ģ������������ֱ��÷��� ��ʾ�����������Ϊu1,ģ�������÷��� ��ʾ�����������Ϊu1,ģ�������÷��� ��ʾ���� ��ʾ����
�������ߵ������ȼ��ֱ����£���
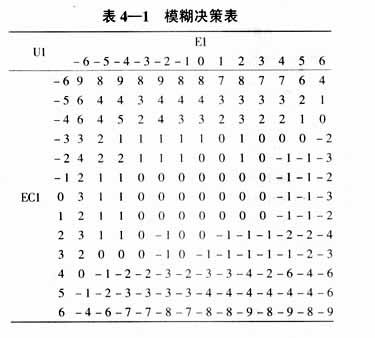
������ǽ�ģ�����ƹ���״̬�����������ģ������ֵ��ģ�������е�һ��Ԫ�ش��棬�Ӷ��õ�һ������洢�ڼ�����ڴ��У�����������ɵõ�һ��ѯ����ʹ�÷dz����ٷ��㡣�������ף�4�ݣ��õ�ģ�����Ʋ�ѯ��4��1����
���⣬�������ӵ�ȷҲ�ܹؼ���������Ӱ��ϵͳ�Ķ�̬���ԣ���Ӱ�쵽ϵͳ����̬���ԡ������µķ���ʵ���У��������Ӿ���ȡ�ýϼ�ֵ����
5��������
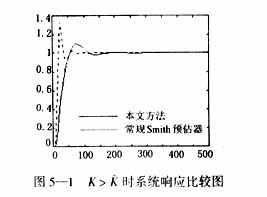
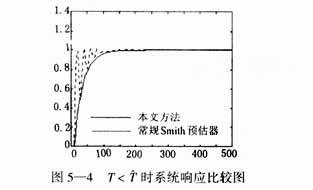
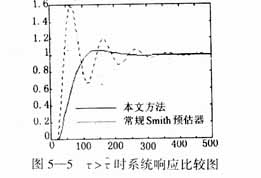
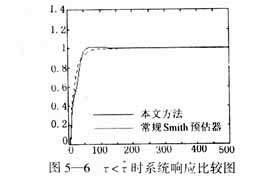
ȡʵ�ʶ���Ϊ ������ģ��Ϊ ������ģ��Ϊ ������½��з��档����ʵ�ʹ��̸������������仯ʱ�����¾ͶԳ���SmithԤ�����ƺͱ�������ķ������бȽϡ��� ������½��з��档����ʵ�ʹ��̸������������仯ʱ�����¾ͶԳ���SmithԤ�����ƺͱ�������ķ������бȽϡ���
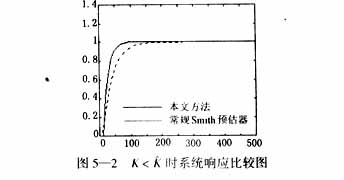
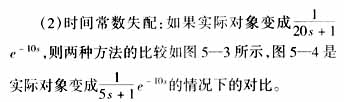
(1)����ʧ�䣺���ʵ�ʶ����������2 �������ַ����ıȽ���ͼ5��1��ʾ��ͼ5��2��ʵ�ʶ���������С�����������£����ַ����ĶԱȡ� �������ַ����ıȽ���ͼ5��1��ʾ��ͼ5��2��ʵ�ʶ���������С�����������£����ַ����ĶԱȡ�
 �� ��
��
 �� ��
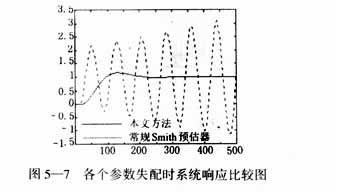
�ɼ�����ģ�Ͳ���ʧ�������£���������ķ����õ���Ч������SmithԤ��ϵͳҪ�á��ر�ģ�����в�����ʧ�������£���������ķ�����Ȼ����ʹϵͳ�ȶ������нϺõĿ���Ʒ�ʣ�������SmithԤ�������Ѿ���ɢ����
6���۪�
�����ô����ֵ�ģ�����������䵱��ģ���������õ���ʱ��ϵͳ��һ���µ����ܿ��ƽṹ�������к���ģ�ṹ���Ƶ�³���Ժ��ȶ��ԡ�������Ҳ�����˴˷��ȳ���SmithԤ��������³���Է��������ԸĽ���ͨ�����滹���֣��ÿ���ϵͳ�У�ģ���������ı������Ӻͻ������ӵĴ�С�Ǻ���Ҫ�ģ������ص������ǿ��Եõ��Ƚ������ϵͳ��Ӧ����
�۲ο����ףݪ�
��1��Smith,O��J��M��.Closer Control of Loops with Dead Time��J�ݪ�Chemical Engineering Progress,1957,53(5):217��219.��
��2��Garcia C E.Morari M. Internal model control.1.A Unifying review and some new results��J�ݪ�IEC Proc Des Dev.1982,27:308��323.��
��3��River�] D E,Morari M.Skogested S.Intemal model control.4.PID controller disign��J�ݪ�IEC Pro Des Dev,1986,25:252��265.��
��4��Ҧ���ϣ�ŷ�Ī����д��ͺ�һ���Զ����ģ�����ƹ����о���J�ݪ��Զ������DZ���1995��10(1)��27��30
|





 ���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ���
���������ۣ���ֻ��ʾ����10������������ֻ�������ѹ۵㣬�뱾վ�����أ���