韩忠旭1 孙颖2
1.中国电力科学研究院,北京100085;2.东北电力学院,吉林省吉林市132012
1 引言
现代控制理论中系统的极点配置、镇定、输入-输出解耦和干扰解耦、无静差渐近跟踪和线性二次型最优控制等,都要依赖于引入适当的状态反馈才能实现。但是,状态反馈的物理实现通常会遇到许多困难,甚至不可能实现,从而出现了状态反馈在性能上的不可替代性和在物理上的不能实现性之间的矛盾。解决这一矛盾的途径之一就是重新构造一个系统,利用原系统可直接测量的变量作为其输入信号,并使其输出信号在一定的约定下等价于原系统的状态,然后再以此代替系统的真实状态来实现所要求的状态反馈。这个用以实现状态重构的系统就是观测器。
状态观测器的理论问题,在许多文献[1,2]中有所论述,其在工程实践中的应用也有成功的实例[3],但由于种种原因,其应用的广度和深度都还远远不如PID调节器,其中很重要的一点就是如何针对具体问题构造一个合适的观测器。自动控制工程师知道怎样选择PID调节器和设计一个什么样的常规控制系统来解决特定的工程问题,但与此相对比,在现阶段还难以达到针对具体的被控对象熟练地应用观测器理论进行状态重构的地步。在过程控制领域的实际问题中,许多复杂的被控对象均可以分解成一些典型的环节,或者说被控对象是由这些典型的环节以不同的方式组合而成的。本文根据状态观测器理论,结合多年来在热工自动化领域的工程实践,从一个实际的工程问题出发,对状态重构的实用与适用技术进行了一些有益的探索,研究其中一类典型动态环节――无自平衡特性的多容环节的状态观测器的构成及其降维方法,并希望以此为开端,不断拓宽状态重构与状态反馈的实际应用范围。
2 几种典型的无自平衡特性多容环节的传递函数
无自平衡特性的多容环节可由不同特性的几个环节组成。如一个或几个积分环节和惯性环节可串联成这一类多容环节。文[4]给出了下面的两种形式:

文[5]以火电厂锅炉汽包水位为研究对象,给出了一个无自平衡特性的多容环节的应用实例,即如式(3)所示的汽包水位动态特性

3 无自平衡特性的多容环节的观测器设计
这里先以式(4)为典型,讨论这类无自平衡特性的多容环节的观测器设计。
可以验证,式(4)的一等价形式为

根据式(5),运用观测器理论设计的一个观测器如图1所示。
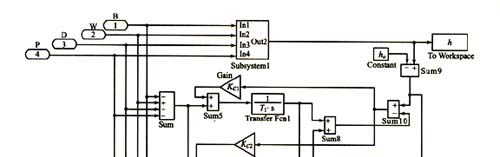

图1中Subsystem1是被控对象的传递函数,观测器由Transfer Fun1和Transfer Fun以及若干个加法器Sum构成,状态观测器的反馈矩阵为Kc=[Kc1,Kc2],状态反馈矩阵为K=[K1,K2,K3,K4]。
若式(4)的各个分式中的T1不相等时,设其分别为T1W、T1D和T1P,则式(4)变为



对于式(5b),仍采用图1所示的观测器,此时被控对象Subsystem1由式(4b)构成,观测器中的T1=1,T2=10。
图2为仿真试验结果。

以下讨论其它类型的无自平衡特性的多容环节的观测器设计。
对于如式(1)所示的积分环节与惯性环节串联而成的动态环节,有
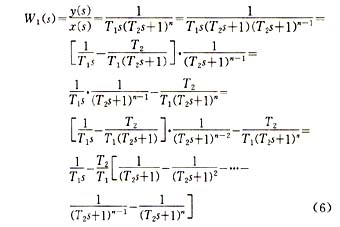
对于式(6),仍采用图1所示的观测器,此时被控对象Subsystem由式(6)构成。观测器仍由积分环节和一阶惯性环节构成:T1=1,T2=2,但输入端为单输入。
由仿真试验得到的输出响应曲线如图3所示。

式(2)所示的积分环节与惯性环节并联而成的动态环节,不过是式(4)的一个特例,也是最简单的情形,对图1所示的观测器稍加简化即可应用。
4 无自平衡特性的多容环节观测器的工程物理意义
无自平衡特性多容环节的一个典型工程实例是火电厂锅炉汽包水位的动态特性,其突出特点是:当水位偏离给定值后再调节给水量,则由于给水量改变后有一定的滞后时间(或惯性)才能影响到水位,因此水位必然要有较大的变化,其传递函数具有如式(1)所示的积分环节与惯性环节串联而成的动态环节;在负荷变化时,由于产生“虚假水位”现象,水位将迅速变化,其传递函数具有如式(2)所示的积分环节与惯性环节并联而成的动态环节,这个水位暂时变化的幅度是不能靠控制给水量来减小的。对于虚假水位严重的锅炉,为了在负荷变化时水位不超出允许范围,必须限制负荷的一次突变量和变负荷的速度。由于影响汽包水位的因素很多(其传递函数如式(4)所示),并且存在着“虚假水位”现象,如果只根据水位控制给水量,那么在负荷变化的开始阶段“虚假水位”增加,给水量的变化将与负荷变化的方向相反,因而扩大了锅炉进出口工质的不平衡,水位必然要有较大的变化,尤其是水位响应速度快的锅炉,水位的偏差更大。这种情况在设计给水自动控制系统时必须加以考虑。
从这个实际的工程问题抽象出来的数学表达式可由式(1)、(2)或(4)来表示。由于观测器能够提取出代表汽包水位实质变化的状态量,即通过图1所示的Transfer Fcn1产生的一个输出信号,该信号代表的是汽包内部的质量平衡关系,如若把它反馈给控制系统,则可以及时反映汽包水位的实质变化,并通过状态反馈控制改善系统的调节品质。
对于本文设计的无自平衡特性的多容环节观测器,其物理意义的另一解释可以从预测控制的角度来分析。如式(1)所示的由积分环节与惯性环节串联而成的动态环节,由于惯性环节的串联有一个大迟延,因此由积分环节所代表的质量平衡关系不能及时地反映到输出端的测量信号上,采用了观测器之后,情况就可得到明显的改善,将观测器中积分环节的输出作为状态反馈,使控制系统可以及时根据质量平衡关系的变化来修正控制指令,以便改善调节品质。
将状态反馈引入到串级给水调节系统,其仿真试验的结果如图4所示。


图4 状态反馈-PID控制与PID串级控制的响应特性
从图4可以看出,控制系统中加入状态反馈后,可以改善动态特性,减小动态偏差。
5 结束语
本文将实际工程中的一类难以控制的被控对象作为研究内容,这一类被控对象具有无自平衡特性多容环节的动态特性,它们或者由于虚假现象(如汽包水位的“虚假水位”)引起控制系统的瞬态正反馈,或者由于惯性环节的串联而导致较大的控制迟延。本文的工作提供了一种解决此类技术问题的实用的方法与途径,通过设计一类适用(并不要求严格精确)的观测器,提取出最能反映系统内部实质变化的状态量,再运用状态反馈来改善控制系统的调节品质。
仿真试验结果可得到如下结论:①对于类似于式(4)所示的被控对象,无论各项分式中的T1和T2相等与否,图1所示的算法都可以作为它的一个观测器。②对于如式(1)所示的由积分环节与惯性环节串联而成的高阶无自平衡特性的动态环节,图1所示的算法仍可以作为它的一个观测器。
参考文献
[1]郑大锺,石纯一.自动控制原理与系统(下册)[M].北京:国防工业出版社,1980.
[2]段广仁.线性系统理论[M].哈尔滨:哈尔滨工业大学出版社,1996.
[3]韩忠旭,张智.状态观测器及状态反馈控制在亚临界锅炉蒸汽温度控制系统中的应用[J].中国电机工程学报,1999,19(11).
[4]章臣樾.锅炉动态特性及其数学模型[M].北京:水利电力出版社,1987.
[5]张玉铎,王满稼.热工自动控制系统[M].北京:水利电力出版社,1985.
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)