戴家祯
深圳市能源集团有限公司, 广东 深圳 518031
1 引言
在电力系统机网暂态过程的数值仿真中,绝大部分系统元件都是按照三相对称、相间有耦合来处理的,在进行仿真计算时,通常直接采用梯形法将以微分方程表示的三相系统元件的特性方程化为相应的差分方程组,由于相间耦合的存在,该差分方程组需要三相联立求解,计算量很大。对于同步电机等元件,必须采用dqo坐标系来描述其电磁特性,在EMTP等常用的仿真程序中,对旋转电势只能采用预估的方法,从而使仿真的稳定性和精度都受到影响[1]。
本文介绍的旋转因子法是一种适用于电力系统机网暂态过程数值仿真的新方法,该方法基于派克变换,通过引入旋转因子,能将电力系统中三相对称、有相间耦合的系统元件用相互解耦的d、q、o三轴瞬态等值电路来表示,从而达到简化计算的目的。将这一方法应用于同步电机的数值仿真,得到的同步电机模型,不仅能实现解耦计算,而且无须对旋转电势进行预估,比传统的EMTP模型更稳定,在同等条件下,计算结果更精确。
2 旋转因子法的基本原理与特点
在此以三相对称、有互感的电感元件为例,说明旋转因子法的基本原理。三相对称、有互感的电感元件的动态特性可以用以下的电压方程来表示:
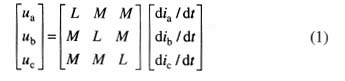
在通常的电力系统仿真程序中,一般直接采用梯形法将该微分方程化为相应的差分方程,并得到如下的递推格式:
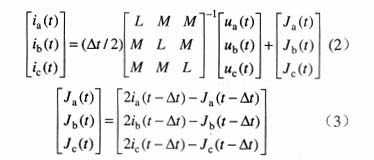
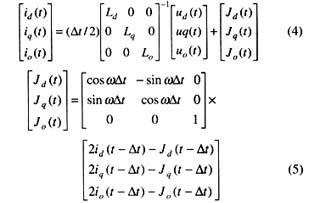
根据这一递推格式得到的三相电感元件在abc坐标系下的瞬态等值电路如图1所示。通过派克变换将式(1)变换到dqo坐标系,并采用文献[2]中介绍的方法将dqo坐标系下三相电感元件的微分方程化为相应的差分方程,可得
式中 Ld=Lq=L- M和Lo =L+2M分别是该三相电感元件的正序电感和零序电感。
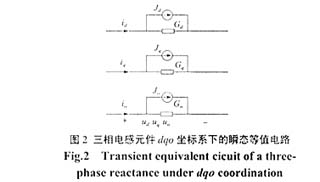
根据这一递推格式可得三相电感元件在dqo坐标系下的瞬态等值电路如图2所示。实际上,对于三相电容等系统元件也可以推导出如图2所示的解耦的瞬态等值电路[2]。
与传统的元件模型相比,新模型具有以下几个主要特点:
(1)比较式(2)和式(4)及图1和图2可以发现,采用传统模型时,a、b、c三相元件存在相间耦合,不能实现解耦计算,而采用新的模型后,d、q、o三轴分量间不存在耦合,可以实现解耦计算,使程序大为简化,计算量大大减少,实践表明,在相同仿真步长时,计算量可减少1/3以上[3,4]。
(2) 比较式(3)和式(5)可以发现,两种瞬态等值电路中等值电流源的求取略有不同,新模型是在采用传统的方法求得d、q轴的等值电流源后,再将该等值电流源乘以一个旋转因子,因此,新模型被称为“旋转因子法”。
(3) 大量算例表明,在进行由R-L-C构成的电力网络的暂态过程的数值仿真时,在相同的仿真步长下,旋转因子法与传统的梯形法具有基本相同的计算精度,两者的相对误差不超过0.05%[3,4]。
(4) 与传统的梯形法一样,旋转因子法具有很好的稳定性,对一个具有7个节点、11条支路的电力网,其各种类型的短路与断线故障的仿真计算表明:当仿真步长取0.25 ms时,仿真计算进行到t=1000 ms,即进行了4000步仿真计算后,计算结果仍能很好地保持稳定。该模型的稳定性还表现在计算结果并不会随仿真步长的增大而明显改变,当仿真步长从0.05 ms增加到0.5 ms时,仿真计算的相对误差亦不会超过0.5%。
3 采用旋转因子法的同步电机模型
由于同步电机的重要性和特殊性,即使在传统的EMTP程序中,同步电机也是以dqo坐标系来描述的,将旋转因子法应用于同步电机的数值仿真,得到的同步电机模型较传统的同步电机模型有突出的优越性。
在实用正方向下,有阻尼绕组同步电机的动态行为可以用下面的电压方程和磁链方程来描述(零序分量因不影响下面的分析推导,故另行考虑):
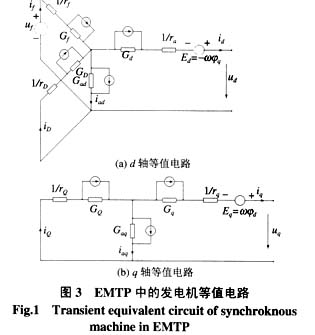
在以往的电力系统仿真程序中,直接采用梯形法将电压方程式(6)化为相应的差分方程组,并根据该差分方程组和磁链方程式(7)得到同步电机的瞬态等值电路,如图3所示[1]。这个等值电路实际上是由反映电枢反应和各绕组漏磁的一系列电感元件的瞬态等值电路简单组合而成的,但是,根据这个等值电路,在进行时刻t的仿真计算时,旋转电势Ed= -wjq,Eq= wjd是未知量,需要根据前一时段磁链的计算值及其变 化率进行外推预估,因此,当仿真步长取得较大时,该模型会出现不稳定现象[1]。
为了将旋转因子法应用于同步电机的数值仿真,首先把式(6)写成如下的矩阵形式:
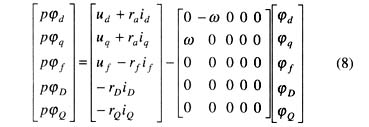
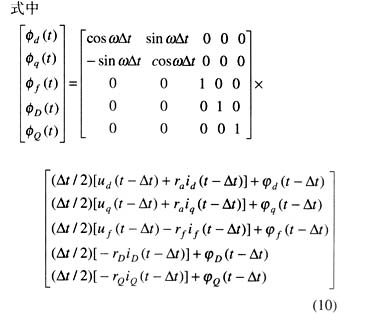
严格地说,在机网暂态过程中,机械角速度w是一个随时间而改变的变量,但其变化的速率要远远小于磁链、电流和电压等电磁变量的变化速率,因此,在一个很小的仿真时步[( t-Δt ), t ]内,可以近似地认为w是一个常数。这样,式(8)在形式上与文献[2]中三相电感元件在dqo坐标系下的电压方程是一样的,仿照文献[2]中的推导,可以得到如下关于有阻尼绕组同步电机电压方程的差分格式:

将式(7)改写成如下形式:
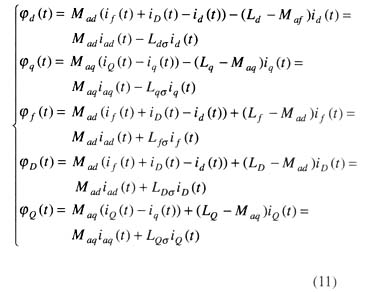
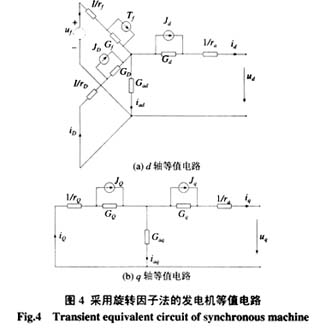
根据式(9)~(11),仿照文献[5]中的推导,可以得到如图4所示的有阻尼绕组同步电机的d轴瞬态等值电路和q轴瞬态等值电路,其中,


4 算例与讨论

额定功率因数为0.85。假设空载运行时在机端发生突然三相短路,暂态过程中励磁系统和机械系统的调节作用略去不计,即假定在整个暂态过程中励磁电压和发电机的角频率保持为故障前的数值,分别取仿真步长为0.05 ms和0.25 ms,采用同步电机的旋转因子法模型对该故障的暂态过程进行仿真计算,得到的定子电流d轴分量id (t )和转子电流if (t )的结果如表1所示。在表1中还给出了当仿真步长分别为0.05ms和0.25ms时,采用EMTP模型进行仿真计算所得到的结果,以资比较。
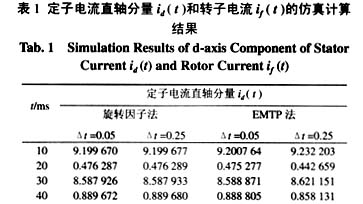

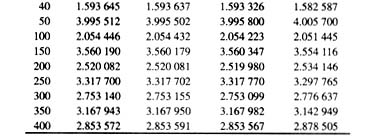
比较以上同步电机的2种不同的瞬态等值电路及其算例结果可见:
(1) 采用旋转因子法的同步电机瞬态等值电路与传统的同步电机瞬态等值电路具有相同的电路结构和网络参数,所不同的只是等值电流源的计算公式,这给仿真程序的编制带来了极大的便利。
(2) 采用旋转因子法的同步电机瞬态等值电路中不再有串联的旋转电势,因此也就无需对旋转电势进行预估,从而能从根本上解决传统模型中因需要对旋转电势进行预估所造成算法的稳定性问题。
(3) 算例表明:采用同步电机的旋转因子法模型得到的结果是稳定的,计算精度也很高,当仿真步长取0.25 ms时,总体的计算误差不超过0.1%。采用EMTP模型进行仿真计算,当仿真步长取得较小(Δt = 0.05 ms)时,仿真结果尚能保持稳定,其计算精度与采用旋转因子法时的计算精度基本相同,但当仿真步长取得稍大(Δt = 0.25 ms)时,仿真计算会出现不稳定现象,当仿真进行到200 ms以上时,仿真误差已超过5%。如果要控制EMTP模型的仿真误差,使其与旋转因子法模型处于同等水平,则须成倍地减小仿真步长,这就需要成倍地增加仿真的计算量及其所占用的计算时间。
5 结论
(1) 采用旋转因子法进行电力网络机网暂态过程的数值仿真,能将电力系统中三相对称、有相间耦合的系统元件用相互解耦的d、q、o三轴瞬态等值电路来表示,从而达到简化计算的目的。
(2) 在电力系统机网暂态过程的数值仿真中采用旋转因子法的同步电机模型,不仅能实现解耦计算,而且无须对旋转电势进行预估,比传统的EMTP模型更稳定,在同等条件下,计算结果更精确。
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)