李颖晖1,张保会1,李 勐2
1.西安交通大学,陕西西安710049;2.国防科技大学计算中心,湖南长沙410073
1 引言
受扰动后的非线性系统的稳定域边界是系统的稳定边界上的不稳定平衡点的稳定流形的并集构成。由于稳定流形定义为受扰动后系统的解的集合,因此通过求系统的稳定流形来确定稳定边界是十分困难的。由非线性系统理论可知,对系统的运动方程进行特定的线性及非线性变换,可以将非线性系统的稳定流形变换为对应的线性系统的稳定子空间,因此用二阶的Normal Form变换确定扰动后的电力系统稳定边界应运而生[1~3]。但是这种非线性变换存在多值性的问题[4],在确定系统的临界切除时间时遇到困难,从而也阻碍了高阶的NormalForm变换的应用,使得用二阶的Normal Form变换确定的稳定边界的准确性得不到提高。
本文提出了另一种非线性变换,同样也将非线性系统的稳定流形变换为与其对应的线性系统的稳定子空间,但由于这种非线性变换是多对一的映射,不存在映射的多值性问题,因此可以考虑应用较高阶的非线性变换,使得稳定边界的精确度得到保证。
2 运动方程的矩阵表达
由于要对电力系统的运动方程作线性及非线性变换,因此首先要将系统的状态方程按泰勒级数展开,并表示为矩阵的形式。
2.1 功角和角速度的状态空间下状态方程的数学描述
在系统的功角和角速度的状态空间下,取第n台机为参考机,取故障后系统的主导不稳定平衡点为系统的坐标原点,电力系统的运动方程为

式中 X为N维列向量;F为关于X的N维函数向量;N的值在n台发电机电力系统中为2 n-2。
将X的第i维分量写出,Fi(・)为函数向量F的第i维分量



电机功角和角速度所在空间称为X空间。
2.2 从X空间线性变换到Y空间系统的状态方程的描述
在系统的主导不稳定平衡点(CUEP)处,对系统的运动方程作特定的线性和非线性变换,则非线性系统在CUEP处的稳定流形变换为对应线性系统的稳定子空间,从而求稳定流形的问题转化为求线性系统的稳定子空间的问题。
从X空间变换到Y空间,是对系统作一相似变换,有
X=UY (6)
式中 矩阵U满足矩阵方程 ,矩阵A即是在X空间中系统状态方程的雅可比矩阵,矩阵A的特征根可能有若干对共轭复数,设为αi+jωi,αi-jωi,i取1至nm,矩阵Jr的对角元素由矩阵A的特征根组成,Jr写为 ,矩阵A即是在X空间中系统状态方程的雅可比矩阵,矩阵A的特征根可能有若干对共轭复数,设为αi+jωi,αi-jωi,i取1至nm,矩阵Jr的对角元素由矩阵A的特征根组成,Jr写为

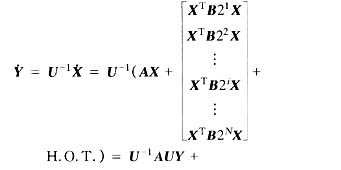
对式(5)按式(6)作线性变换,则式(5)必定可以变换为以下的形式

因为变换是线性的,所以在X空间的二次项变换到Y空间仍然是二次项。将式(5)的右边写成线性及二次项与二次以上项的和,以求得二次项在Y空间的表达式为


同理,利用线性变换后X空间的某次项映射到Y空间为同次项,可以唯一地确定C3i、C4i、C5i,具体确定的方法参见文[5]。
3 非线性变换阵的确定
3.1 非线性变换的形式
在以往的Real normalform法确定电力系统的稳定边界的研究中,所采用的非线性映射为
Y=Z+ZT×h2 r×Z
从非线性变换的形式上可以看出,从Y空间到Z空间的非线性映射是一对多的映射,通过这样的非线性变换,在Z空间中的稳定边界可以显式地给出,即Zi=0。但由于从Y到Z为一对多的映射,Y空间中的一条持续故障轨线映射到Z空间中成了多条轨线,因此确定临界切除时间的计算遇到困难,这就是非线性映射的多值性问题。
为避免非线性映射的多值性问题,本文采用的非线性变换的形式如下

式中 H2i为二阶非线性变换矩阵;H3i为三阶非线性变换矩阵;H4i和H5i为四阶非线性变换矩阵。
式(12)之所以采用这样的形式,是由于在原始系统中,运动方程的泰勒展开式中某些系数为0,运动方程可以用矩阵表达,并写为式(5)的形式,为了保持原始系统运动这样的特点,本文在非线性变换中,令同类项的系数为0,因此非线性变换的具体形式就成为式(12)所描述的。
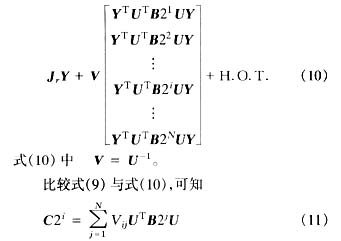
在式(9)的非线性映射下,在Y空间系统的状态方程的四阶及其以下的项变换为规范形式

3.2 确定非线性变换矩阵
对式(12)的两边求导,得



式中 T1、T2、T3、T4分别为关于Y的线性及二次、三次、四次项



式(20)等号的右端括弧内的1、2、3项分别为关于变量Y的一次、二次、三次项,括弧内的第4、5项为关于变量Y的四次项,与式(16)~(19)表示的一、二、三、四次项对应相等联立4个方程,可以确定非线性变换矩阵。
3.3  、(2)、(3)的确定 、(2)、(3)的确定
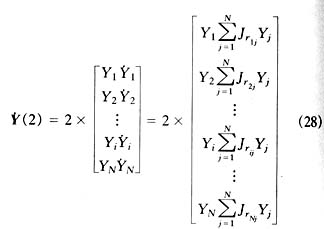
3.3.1 Y的确定
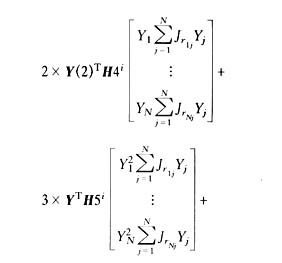
在式(14)中,由于与相乘的有Y、Y(2)、Y(3),即YTH2i或TH2iY、TH2iY(2)、YTH2iY(3)三项,而这三项的积只考虑四次及其以下的项,因此与Y相乘的最高项取三次项

与Y(2)相乘的最高项取二次项


由于(2)要分别与Y和Y(2)相乘,要略去五次及
其以上的项,因此与Y相乘时,(2)最高项取三次项,与Y(2)相乘时(2)最高项取二次项。又因为





4 稳定边界的解析表达及临界切除时间的确定
将实部大于0的特征根放在矩阵Jr的第1个元素位置上,则原始系统在主导不稳定平衡点附近的稳定边界经线性及非线性变换后为
Z1=0(31)
在主导不稳定平衡点附近的稳定边界变换到Y空间为


原始系统的持续故障轨线经过线性变换X=UY,变换为Y空间的持续故障轨线,经式(12)的非线性变换,Z空间的持续故障轨线为
Z=(Z1,Z2,…,Z2 n-2)(33)
将Z空间的持续故障轨线与稳定边界Z1=0相交,交点即为Z空间中持续故障轨线在稳定边界
上的出口点,对应的积分时间为临界切除时间。
求得了Z空间的持续故障轨线Z1(t1),Z1(t2),…,Z1(ti),…。若
Z1(ti)×Z
[1] [2] 下一页
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)