武守远,蒋卫平,李亚健,周孝信,曾昭华,梁 军
中国电力科学研究院,北京100085
本文工作是“东北伊敏―冯屯500kV可控串补研究”课题(下称“伊冯课题”)的内容。伊敏电厂位于内蒙古的东部,二期工程投运后容量达2200MW,通过双回500kV线路向大庆、哈尔滨等负荷区送电时,存在严重的稳定问题。由于环境因素的影响,短期内不可能架设更多线路或开关站,因此研究通过可控串联电容(TCSC)来提高线路的输送能力、解决电网稳定问题是“伊冯课题”所研究的内容。
可控串补是一种通过晶闸管控制来实现补偿度调节的线路串联补偿装置,用于提高输电线路输送功率、改善电网潮流分布、提高电网的暂态稳定水平以及抑制低频振荡和次同步谐振等。其主电路原理示意图见图1。
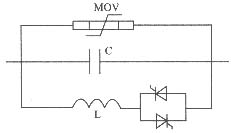
图1 TCSC主电路示意图
TCSC有3种基本工作状态:①晶闸管阻断状态(thyristor blocked mode),TCSC相当于常规串补。②旁路状态(thyristorswitched reactance,or by-pass mode),晶闸管持续导通相当于短路,串补电容被小阻抗电感旁路。③相控调节方式(thyristorphase control),通过晶闸管导通角调节串联补偿阻抗。
为研究TCSC的控制规律及其对提高电网稳定性的作用,“伊冯课题”系统分析组进行了大量的研究和数字仿真计算[2~5],提出了许多控制策略,并进行了设计和数字仿真。这些控制策略包括常规比例积分微分(PID)控制器以及模糊控制、非线性自适应控制、自抗扰控制算法等。数字仿真分析的结果表明,在相应的策略控制下,TCSC能够显著提高系统稳定性,提高线路输送能力。
本文介绍的工作是利用实际控制器和TCSC物理模型,在暂态网络仿真系统上进行的伊敏―冯屯500kV输电系统暂态稳定控制模拟试验研究。
1 TCSC控制器简介
TCSC控制器按控制功能分成3个层次:底层、态控制,底层控制通过逻辑编程和底层控制子程序实现。中层控制为阻抗控制。上层控制通过调用中层和底层子程序,实现对TCSC的控制。硬件结构主要由3部分构成:第一部分包括输入电量的模拟量处理、逻辑运算、TCSC底层触发控制和TCSC状态逻辑处理。第二部分是以DSP芯片TMS320C30为核心的数据处理和计算单元,负责数据处理计算及中层控制算法计算。第三部分是上位机(PC机),负责上层控制策略和程序员接口。
2 试验系统
暂态网络分析的试验系统,是由各种电力系统元件的模型组成的,可以按照被研究系统的实际连接方式进行电气连接。元件的模型能精确地体现原型电力系统对象的特性,许多模型是用被模拟对象的小容量物理实体实现的。与数字计算机分析相比较,物理模拟试验分析具有实时性和物理实在性,结果更贴近于实际系统。特别是当有些物理对象缺乏精确数学模型时,模拟分析能起着数字分析无法替代的作用。
本文介绍的物理模拟试验系统与伊敏-冯屯500kV输电系统等值,如图2所示,其中G1是伊敏发电厂4台发电机的等值机。发电机的参数已标于图中。并联的两回500kV输电线路长度为388.5km,其中一回线路(L1)装设固定串补,串补度为25%,另一回线路(L2)装设TCSC,串补都装于冯屯侧。两条线路的两端均装设150Mvar并联电抗器以补偿线路充电功率。

图2 TCSC控制试验两机系统接线图
3 TCSC控制规律及系统暂态稳定性试验
为了分析TCSC的控制规律及其对于暂态稳定的作用,进行了TCSC在多种控制策略下的对比试验。为了便于比较,各种试验对应于同样的初始稳态工况:伊敏侧母线电压527kV,冯屯侧母线电压500kV,线路输送功率2089MW。暂态故障:0.1s伊冯―回线(L2)末端(在图2中的A处)发生三相短路故障,0.2s故障线路跳开。作为比较,第一种情况,无可控串补,即两回线路均为固定串补时,故障切除后系统不能稳定,如图3所示。
需要特殊说明的是,串补测量阻抗在试验中是这样获得的:采集串补两端电压、线路电流,并计算它们的正序分量,二者的商是串补测量阻抗。由于串补装置是电路储能元件,在暂态过程中存在暂态分量和谐波,影响以50Hz为基频计算的测量阻抗。固定串补的阻抗应为27Ω,图中测量阻抗曲线上的高频扰动是暂态分量影响测量阻抗计算所致。下面TCSC控制试验中也有类似情况。
3.1 TCSC控制器用常规PID调节
经典的PID控制,物理意义明确,适应性强,在长期的应用过程中形成了成熟的设计方法,所以在现代工业控制中仍然被广泛采用。本文首先应用PID控制器进行了模拟试验。取安装母线的电压变
换为输入量,传递函数为
在没有其它措施的情况下,系统在PID控制下仍不能保持稳定。主要是因为设计的控制环节在突发的大扰动下,反应速度不够快,没有充分利用TCSC的调节能力。但是在PID控制下电压功角第一次达到+180°的时间由第一种情况的1.1s推迟到2.2s。波形图见图4。

图3 两回线路均采用固定串补时的暂态试验波形

图4 只有简单PID控制下的暂态试验波形
3.2 TCSC用常规PID调节加强补偿
为了充分利用TCSC的补偿调节能力来减小加速功率,TCSC控制器监测到短路故障时,在故障切除后投入强补,强制使TCSC的补偿阻抗达到最大补偿度,约为1.7XTCSC0(XTCSC0是晶闸管阻断状态下的补偿阻抗,线路电流不同,最大补偿阻抗有所变化),强补时间为1.4s。强补时间过后切换为PID控制,传递函数同上。在这种情况下,系统能很好地保持稳定,见图5。线路两端电压角度一摆最大值约为
64°。图中TCSC测量阻抗曲线上的高频扰动是暂态分量影响测量阻抗计算所致,在控制调节下的TC-SC实际阻抗应为滤除高频扰动后的较平滑曲线(见第3节的解释)。
3.3 用常规PID控制加能量函数判断强补时间
在前一试验中,投入强补的持续时间是一个试探值。为了得出能够指导工业设计的实用控制策略,需要找到一个判据来确定强补持续时间。为此构造 了能量函数W=Δω,当故障切除后,Δω由正变负时,表示发电机第一摇摆加速结束,以此作为退出强补的判据。

图5 PID控制加强补时暂态试验波形

图6 PID控制+能量函数判断强补时间
因为Δω不易测量,选择用加速功率来替代,因为ΔP=Pe-Pm=Δω/Tj,当Δω由正变负时,ΔP亦由正变负。试验波形如图6所示,线路两端电压角度一摆最大值约为64°。在本次试验中,根据能量函数判据,实际强补时间为2.1s。
为了比较第3.3和第3.2节试验中控制性能的差别,定义指标J表示发电机功角的摇摆:
 (3) (3)
式中 δ为发电机功角;t0为故障发生时刻;t1为功角摇摆基本平息的时刻。
J等于从故障发生至系统到达新的稳定状态的时间段内功角摆动(绝对值)的积分。用t1替换t∞,可得实用计算表达式,如式(3)右端。在本文的计算中,取t1=10s。
在同样试验条件下,摇摆指标J越小,表明控制器提高暂态稳定的性能越好。
在本节试验中,用能量函数来判断退出强补的时刻,求得摇摆指标J=46.5°s。在第3.2节介绍的试验中,J=60.0°s。通过能量函数计算来判断强补的退出时刻,控制器提高暂稳的性能更优。能量判据的物理意义明确,在实际工程中易于实现。
3.4 非线性自适应控制算法
非线性自适应控制算法是基于非线性几何理论和线性最优算法提出的。其理论解释和数字仿真见文[3]。
非线性自适应控制表达式为
式中 V1、V2为线路首、末端母线电压;δ、ω分别为自定义电角度和角频率;系数k1、k2根据运行状况自适应调整。
在与上面同样的故障扰动下,试验波形如图7所示。

图7 非线性几何控制算法下TCSC暂态试验波形
由本次试验计算求得的指标J=61.9°s。在非线性自适应算法控制下,TCSC控制阻抗很快进入故障后的新稳态。
将几种暂态控制试验得出的摇摆指标汇总于表1。由表看出,强补时间过长、过短的效果都不好;在能量函数判据下,强补效果最优,摇摆指标J最小。
表1 几种暂态试验中功角摇摆比较

4 结论
(1)经典PID控制器的适应性强,适当选取控制参数,可以为系统提供很强的动态阻尼,但是PID控制器对于大幅值冲击变化(故障)的适应能力较差。
(2)PID控制结合投切控制(强补),可以达到比较理想的暂态控制效果,能够提供很好的振荡阻尼作用。
(3)利用能量函数判断强补的退出时间,故障后发电机功角摇摆幅度最小。
(4)文献[4]提出非线性自适应算法,能够适用于强非线性系统,具有很好的鲁棒性。试验发现,应用非线性控制算法构成的控制器,系统初始状态的静态稳定性较差。
(5)在试验研究的两机系统模型上,选择合适的控制参数,多种控制策略均能达到较好的控制效果。
(6)本文设计的控制器从硬件和软件上,能适应多种控制策略试验。在本文试验所用的单机无穷大系统中,发电机100%功率上网,三相短路故障切除一回线路后,在PID控制或非线性自适应控制下系统能够保持稳定。
参考文献:
[1] Working Group14.18.Thyristor controlled series compensation[R].CIGRE.1996.
[2] 张采,周孝信,蒋林,等.可控串联电容补偿非线性PID控制器[J].电网技术,1999,23(10).
[3] Zhou X,Liang J.Overview of control schemes for the TCSC toenhance the stability of power systems[J].IEEProc Generation,Transm and Distrib,1999,146(2).
[4] Zhou XX,Guo Jianbo,etal.Analysis and controlofYimin-Feng-tun 500kV TCSC system[J].Electric Power Systems Research[J],1998,46(3).
[5] Tso SK,Liang J,Zhou X X.Coorination of TCSC and SVCfor improvement of power system performance with NN―based pa-
rameter adaptation[J].International Journal of Electrical Power.
|





 网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)
网友评论:(只显示最新10条。评论内容只代表网友观点,与本站立场无关!)